import cv2 as cv # pip install opencv-python shift +enter
import matplotlib.pyplot as plt ## pip install matplotlibinWidth = 368
inHeight = 368
thr = 0.2
BODY_PARTS = { "Nose": 0, "Neck": 1, "RShoulder": 2, "RElbow": 3, "RWrist": 4,
"LShoulder": 5, "LElbow": 6, "LWrist": 7, "RHip": 8, "RKnee": 9,
"RAnkle": 10, "LHip": 11, "LKnee": 12, "LAnkle": 13, "REye": 14,
"LEye": 15, "REar": 16, "LEar": 17, "Background": 18 }
POSE_PAIRS = [ ["Neck", "RShoulder"], ["Neck", "LShoulder"], ["RShoulder", "RElbow"],
["RElbow", "RWrist"], ["LShoulder", "LElbow"], ["LElbow", "LWrist"],
["Neck", "RHip"], ["RHip", "RKnee"], ["RKnee", "RAnkle"], ["Neck", "LHip"],
["LHip", "LKnee"], ["LKnee", "LAnkle"], ["Neck", "Nose"], ["Nose", "REye"],
["REye", "REar"], ["Nose", "LEye"], ["LEye", "LEar"] ]net = cv.dnn.readNetFromTensorflow("graph_opt.pb")
plt.imshow(cv.cvtColor(img, cv.COLOR_BGR2RGB))
img = cv.imread('another.jpg')
img = cv.resize(img, (800,800))
estimated_image = pose_estimation(img)
plt.imshow(cv.cvtColor(estimated_image, cv.COLOR_BGR2RGB))
from IPython.display import Image
Image(estimated_image) #255/2 = 127.5 [-1,1]
def pose_estimation(frame):
frameWidth = frame.shape[1]
frameHeight = frame.shape[0]
net.setInput(cv.dnn.blobFromImage(frame, 1.0, (inWidth, inHeight), (127.5, 127.5, 127.5), swapRB=True, crop=False))
out = net.forward()
out = out[:, :19, :, :] # MobileNet output [1, 57, -1, -1], we only need the first 19 elements
assert(len(BODY_PARTS) == out.shape[1])
points = []
for i in range(len(BODY_PARTS)):
# Slice heatmap of corresponging body's part.
heatMap = out[0, i, :, :]
# Originally, we try to find all the local maximums. To simplify a sample
# we just find a global one. However only a single pose at the same time
# could be detected this way.
_, conf, _, point = cv.minMaxLoc(heatMap)
x = (frameWidth * point[0]) / out.shape[3]
y = (frameHeight * point[1]) / out.shape[2]
# Add a point if it's confidence is higher than threshold.
points.append((int(x), int(y)) if conf > thr else None)
for pair in POSE_PAIRS:
partFrom = pair[0]
partTo = pair[1]
assert(partFrom in BODY_PARTS)
assert(partTo in BODY_PARTS)
idFrom = BODY_PARTS[partFrom]
idTo = BODY_PARTS[partTo]
if points[idFrom] and points[idTo]:
cv.line(frame, points[idFrom], points[idTo], (0, 255, 0), 3)
cv.ellipse(frame, points[idFrom], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
cv.ellipse(frame, points[idTo], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
t, _ = net.getPerfProfile()
freq = cv.getTickFrequency() / 1000
cv.putText(frame, '%.2fms' % (t / freq), (10, 20), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0))
return frame
estimated_image = pose_estimation(img)
estimated_image = pose_estimation(img)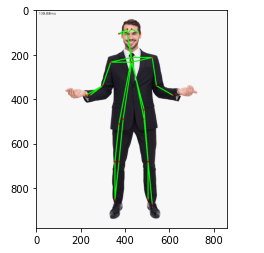
perform on video
cap = cv.VideoCapture('Record_2020_10_13_23_32_51_93.mp4')
cap.set(3,800)
cap.set(4,800)
if not cap.isOpened():
cap = cv.VideoCapture(0)
if not cap.isOpened():
raise IOError("Cannot open video")
while cv.waitKey(1) < 0:
hasFrame,frame = cap.read()
if not hasFrame:
cv.waitKey()
break
frameWidth = frame.shape[1]
frameHeight = frame.shape[0]
net.setInput(cv.dnn.blobFromImage(frame, 1.0, (inWidth, inHeight), (127.5, 127.5, 127.5), swapRB=True, crop=False))
out = net.forward()
out = out[:, :19, :, :] # MobileNet output [1, 57, -1, -1], we only need the first 19 elements
assert(len(BODY_PARTS) == out.shape[1])
points = []
for i in range(len(BODY_PARTS)):
# Slice heatmap of corresponging body's part.
heatMap = out[0, i, :, :]
# Originally, we try to find all the local maximums. To simplify a sample
# we just find a global one. However only a single pose at the same time
# could be detected this way.
_, conf, _, point = cv.minMaxLoc(heatMap)
x = (frameWidth * point[0]) / out.shape[3]
y = (frameHeight * point[1]) / out.shape[2]
# Add a point if it's confidence is higher than threshold.
points.append((int(x), int(y)) if conf > thr else None)
for pair in POSE_PAIRS:
partFrom = pair[0]
partTo = pair[1]
assert(partFrom in BODY_PARTS)
assert(partTo in BODY_PARTS)
idFrom = BODY_PARTS[partFrom]
idTo = BODY_PARTS[partTo]
if points[idFrom] and points[idTo]:
cv.line(frame, points[idFrom], points[idTo], (0, 255, 0), 3)
cv.ellipse(frame, points[idFrom], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
cv.ellipse(frame, points[idTo], (3, 3), 0, 0, 360, (0, 0, 255), cv.FILLED)
t, _ = net.getPerfProfile()
freq = cv.getTickFrequency() / 1000
cv.putText(frame, '%.2fms' % (t / freq), (10, 20), cv.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0))
#time.sleep(2);
#cv.waitKey()
cv.imshow('OpenPose using OpenCV', frame)